The Automation and Robotics Lab is exploring solutions to sensing and production problems to support both crop and livestock applications. This work is being accomplished through the development and application of cutting-edge autonomous control, machine vision, robotics, and computational intelligence technologies. Read on to learn about current and past research projects.
Automatic Control
Navigation Control of PhenoBot
Enable PhenoBot robotic field data collection platform to autonomously navigate through crop fields.
PhenoBot Mast Leveling
Stabilize PhenoBot center mast to reduce noise in navigation and data collection.
Plant Stand Analyzer
Rapidly count number of individual plants in a crop row.
Autonomous Weeder
Detect and remove weeds while traversing through field.

Machine Vision
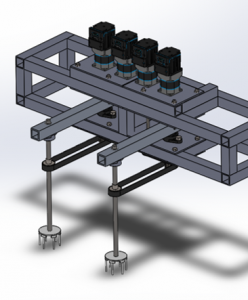
PhenoStereo Camera Development
Create custom stereo camera specialized for capturing consistent, high-quality images of crops for use in trait identification.
Stereo Image Matching
Combine images captured by each PhenoStero camera into single usable image representation.
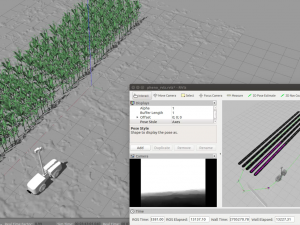
Stereo Camera Point Clouds
Represent image depth by assembling point clouds from stereo images for use in modeling.
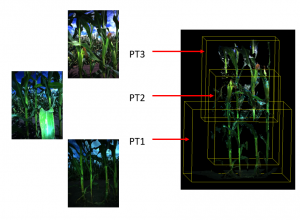
Plant Recognition (Deep Learning for Crop Detection)
Distinguish crops from other types of plants through trained deep learning models.

Agicultural Robotics
PhenoBot Development
Develop mobile robotic platform for traversing crop fields to collect phenotype data from plants.
PhenoBot Manipulator
Expand capabilities of PhenoBot to sample from individual plants alongside bulk row imaging.
Enviratron Rover
Introduce rover to autonomously collect data from experiments running in remote facility.
Robotic Assay for Drought (RoAD)
Create robot to perform non-destructive imaging, weighing, and watering operations in greenhouse environment.
AgRover
Develop robot capable of safely scouting crop fields.



Computational Intelligence
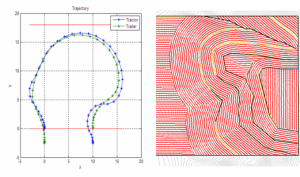
PhenoBot Intra-Row Navigation
Safely navigate PhenoBot through noisy and constricted environment between rows of crops.
AngleNet Image Processing Pipeline
Process plant point cloud image data to determine leaf plant leaf angles.
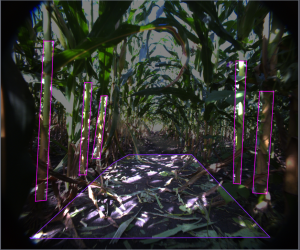
StalkNet Mask R-CNN
Detect and segment individual plant stalks from images taken along base of crop rows.
Optimized Coverage Path Planning
Identify crop planting paths that are coordinate with field operations and topological features while minimizing planting time and other costs.